
具身智能实验室建设方案
前言:具身智能作为人工智能与机械工程、认知科学等多学科交叉融合的新范式,正以“具身+智能”的核心逻辑打破数字世界与物理世界的壁垒,成为迈向通用人工智能的关键路径与新质生产力的典型代表;它通过赋予AI物理实体载体,依托“感知-认知-决策-执行”的闭环技术体系,实现从环境交互中主动学习、动态进化的“知行合一”,彻底改变了传统机器人的任务执行模式。从早期萌芽阶段的逻辑规则探索,到技术积累期的算法突破与仿生机器人研发,再到2022年以来大模型驱动的爆发式发展,具身智能已迈入全球提速阶段,美国、日本、中国等主要经济体纷纷布局,巨头企业加速技术整合与场景落地,其应用已深度渗透工业制造、物流运输、医疗康养、家庭服务等关键领域,推动生产方式与生活形态的深度变革。在此产业浪潮中,博诺智能依托科研积淀与“工业+教育”融合生态,深耕具身智能核心技术,将前沿研究与产业化应用紧密结合,让机器人在复杂场景中具备更强的环境自适应、多任务泛化与拟人化交互能力,为各行业智能化转型提供全链条支撑。



一、前景政策
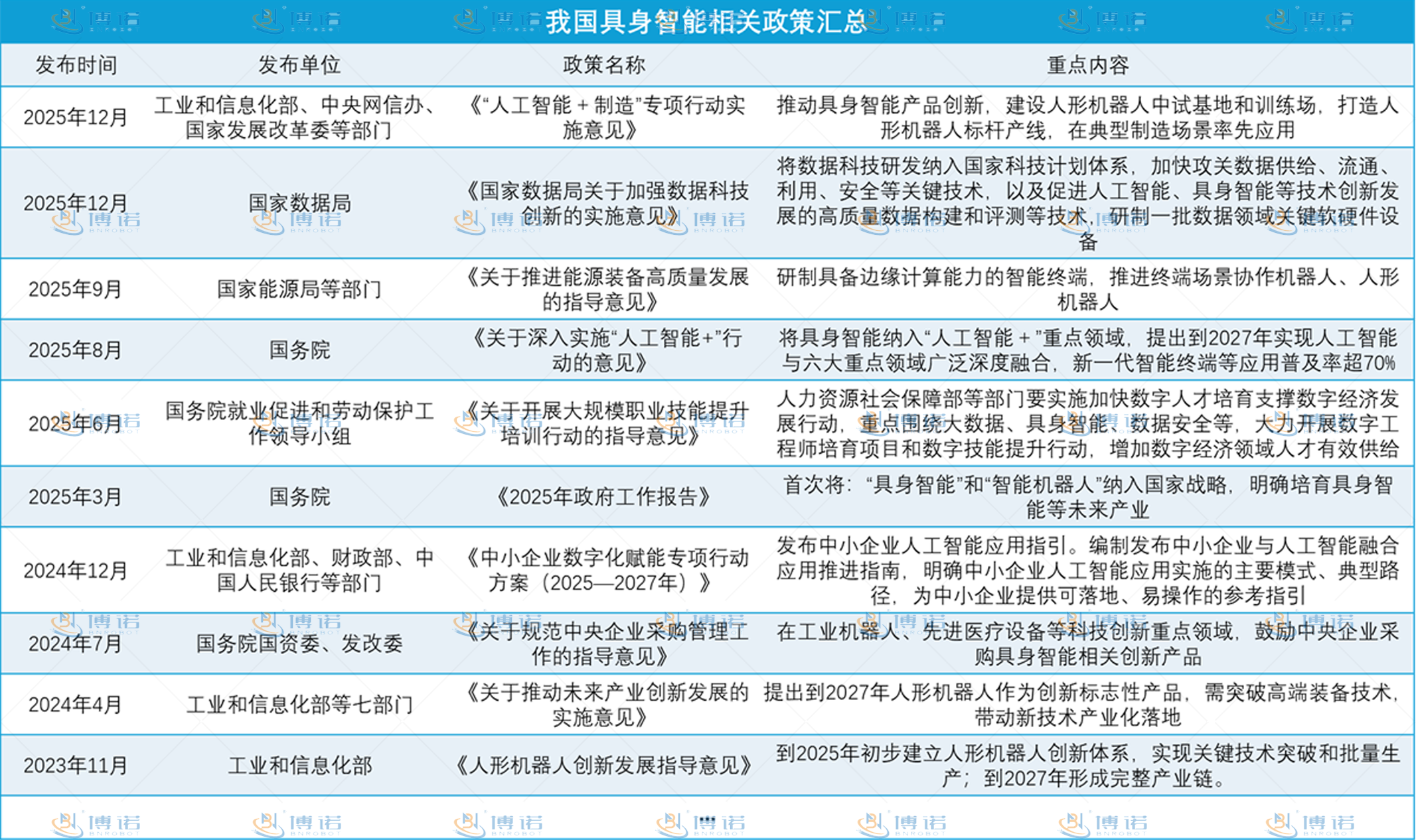
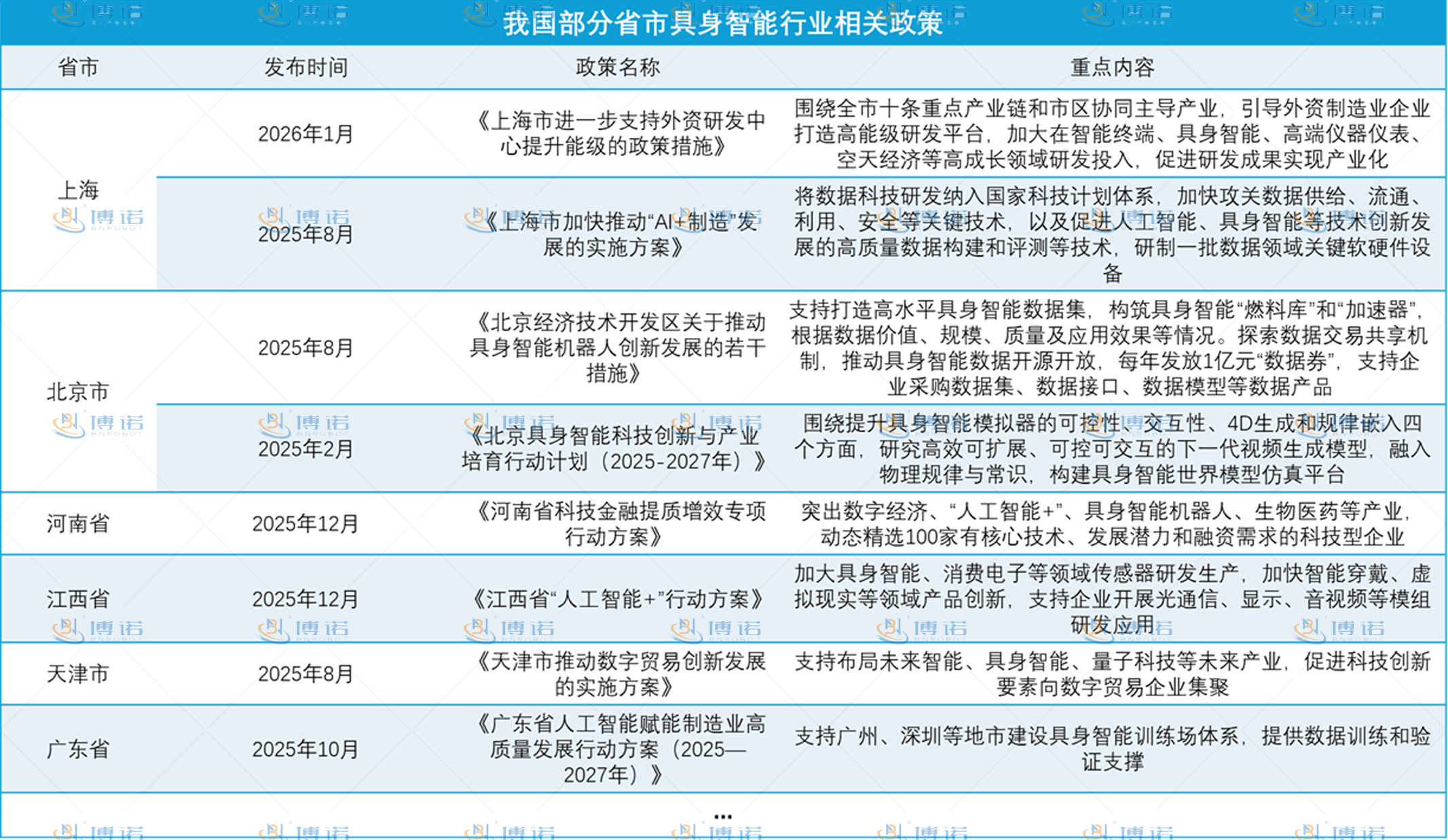
具身智能作为人工智能从“虚拟算法”向“物理实体”跃迁的核心载体,是未来产业增长的核心,已被纳入国家未来产业重点培育清单。2025年全国两会《政府工作报告》首次明确提出“培育壮大具身智能等未来产业”,标志着具身智能正式进入国家战略规划,进入规模化培育与应用的关键期。《新一代人工智能发展规划》、《“人工智能+制造”专项行动实施意见》等政策密集出台,明确提出推动具身智能产品创新、打造人形机器人标杆产线、建设实训基地的要求,加速技术从实验室走向规模化商用。
二、具身智能相关介绍
(一)具身智能概念
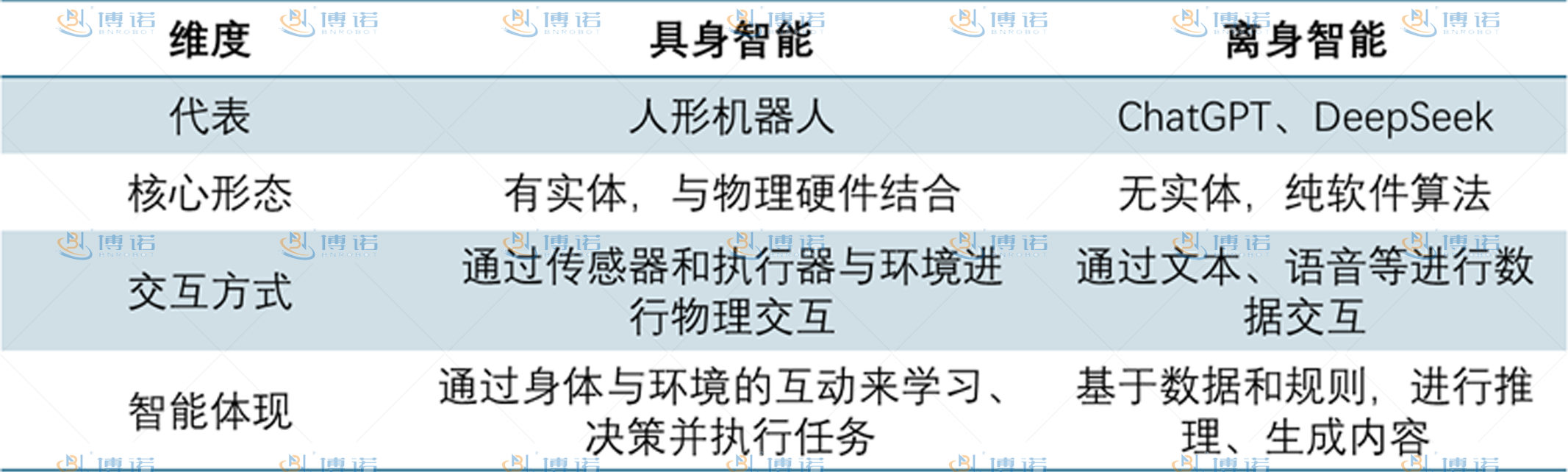
具身智能(EmbodiedArtificialIntelligence,简称EAI)是拥有物理载体的智能系统,核心在于通过身体(硬件载体)与物理世界的持续动态交互产生智能行为,其依托传感器感知环境、执行器输出行动,以“感知—决策—行动—再感知”的闭环逻辑,通过自主学习积累知识技能,既能理解复杂问题、在真实场景中执行具体任务并影响物理世界,又能动态适应环境变化,突破了传统离身智能仅依赖抽象思维的局限,凸显智能需依托物理载体与实践互动得以体现的核心特征。
具身智能可理解为“具身化的人工智能”,“具身”是前提,指有身体且能通过交互、感知、行动执行任务,其本体形态不局限于人形,也不能以此判断是否为具身智能,可依用途场景呈现多种形态,如通用智能机器人、自动驾驶等。“智能”是核心,AI技术嵌入物理实体,能提升其环境感知、交互与任务执行能力,更强调在环境中主动完成全流程任务。
具身智能的实现方式多种多样,可以根据具体任务和环境需求选择合适的智能实体形态,其中人形机器人作为具身智能的典型代表,被视为实现具身智能的最佳载体之一。
(二)具身智能、人工智能、智能机器人、人形机器人概念区分
1.具身智能和离身智能的区别
2.具身智能与人工智能的关系
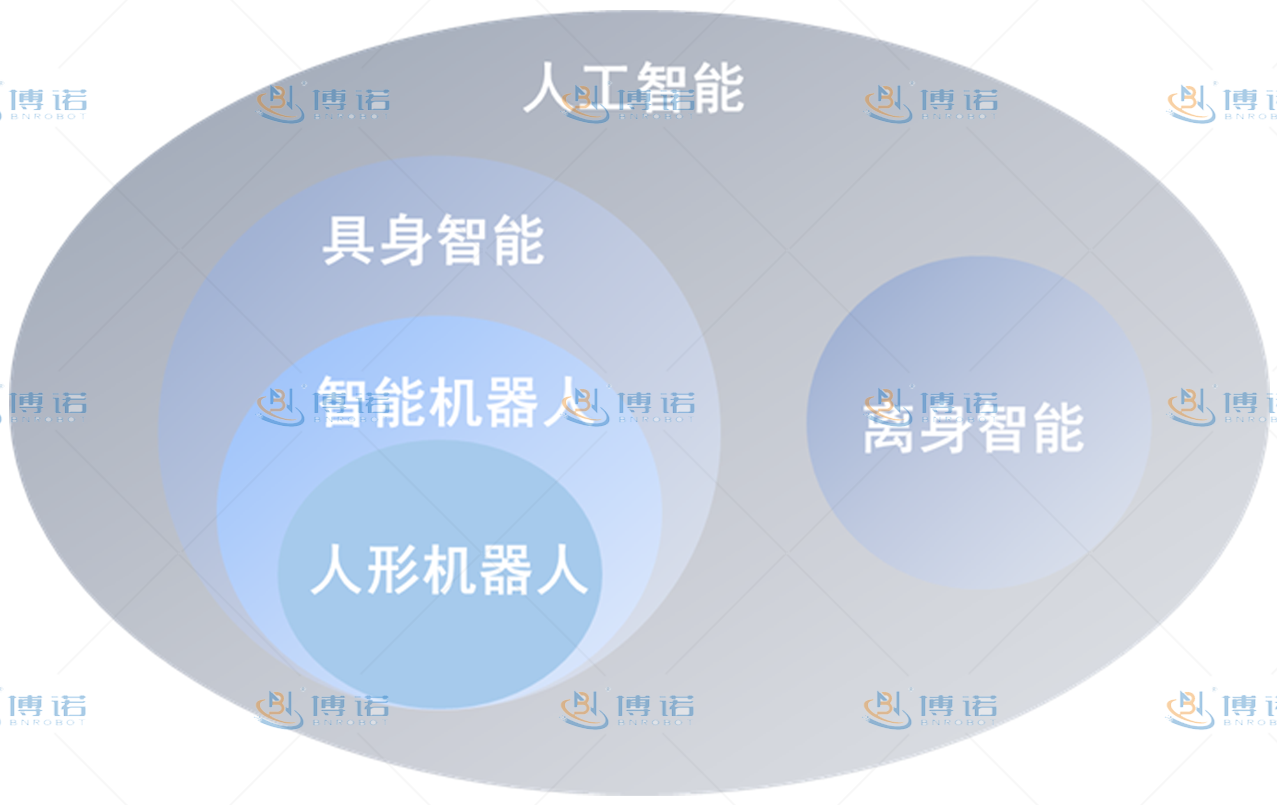
人工智能与具身智能是包含与进阶的关系,具身智能作为人工智能的重要分支与进阶形式,既继承了传统人工智能的数据处理、模型训练及逻辑推理能力,擅长对结构化的数据、图像、语音等信息进行分析处理,又突破了传统人工智能依赖符号处理、局限于虚拟环境完成静态结构化任务的边界,通过增加物理载体并构建“感知—推理—决策—执行”的闭环系统,实现了与物理世界的实时动态交互,完成了从数据处理到物理行为的跃迁,其智能的产生高度依赖身体与环境的互动,更适配动态多变的真实场景,也让人工智能进一步贴近人类智能的感知与应变模式。
3.具身智能与人形机器人的关系
具身智能是一种强调智能依托物理身体与环境动态交互而产生的思想与理念,智能机器人是其最主要的应用载体和产品形态之一,工业机器人、服务机器人等只要具备自主感知、决策和交互能力均可视为具身智能的体现,而人形机器人作为智能机器人的高级形态,凭借仿人的外形能够更好地适配人类环境,是最具潜力的通用具身智能载体之一。
(三)具身智能核心要素
具身智能的系统实现是一个高度协同的工程体系,其包含本体、智能体、数据与学习框架四大核心要素。

本体:实际执行物理实体,在物理或者虚拟世界中进行感知和任务执行,例如四足机器人等。
智能体:系统的决策与推理中枢,承担感知、解析、决策与操控等关键职能,理解复杂的环境结构及其语义内容,并与环境动态交互。
数据:涉及机器人实际执行的数据,目前分为仿真和实时采集。
学习架构:智能体与物理世界的交互,适应新环境、学习新知识并强化解决问题的方法。
具身智能关键:在于机器人能够通过视觉识别身边物理环境并做出决策和行动。
三、具身智能发展历程

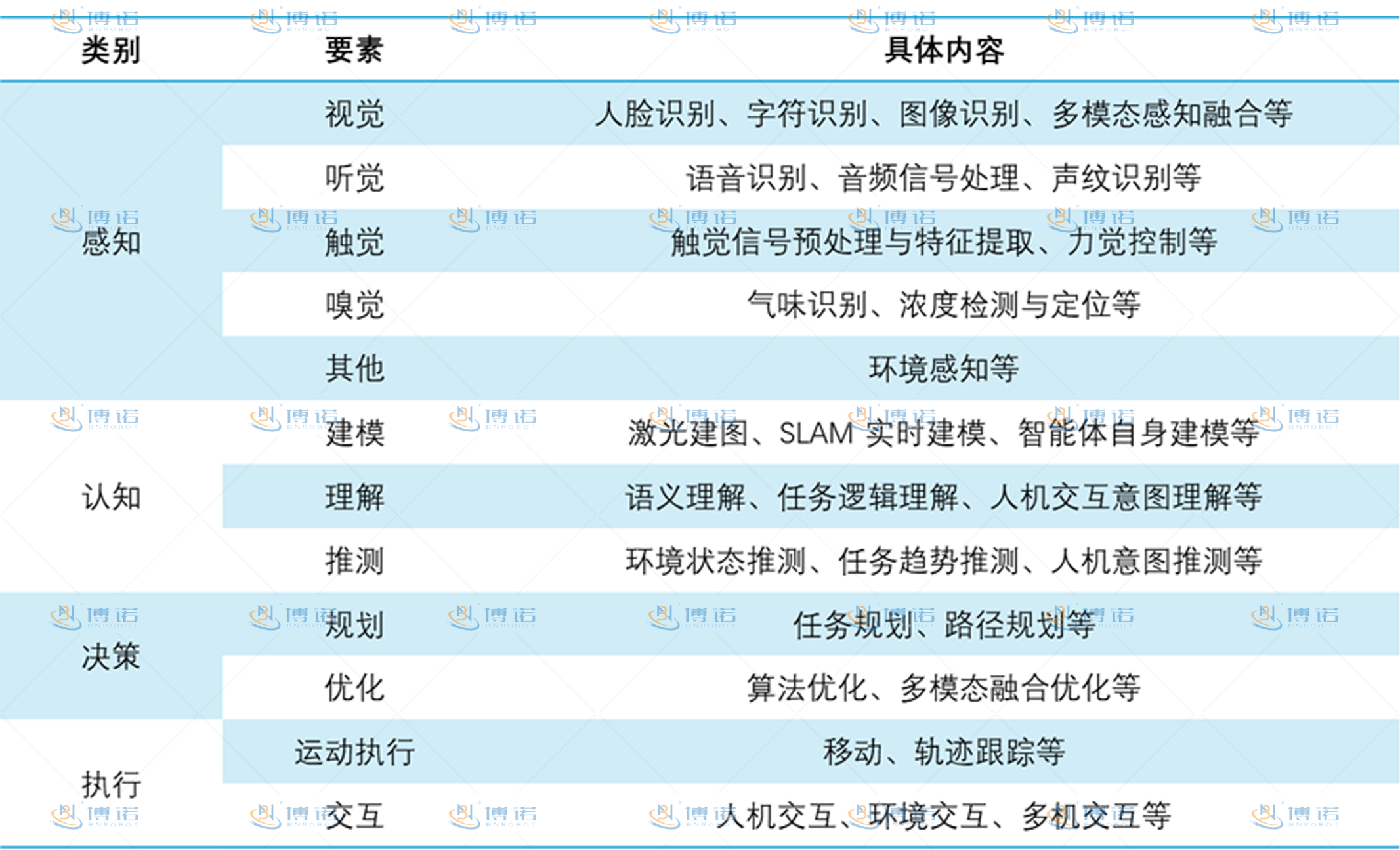
四、核心技术
具身智能整合感知、认知、决策及执行等核心要素,各要素的协同联动可支撑机器人实现环境感知、人机协同交互与任务自主完成,是落地具身智能技术的核心基础支撑。
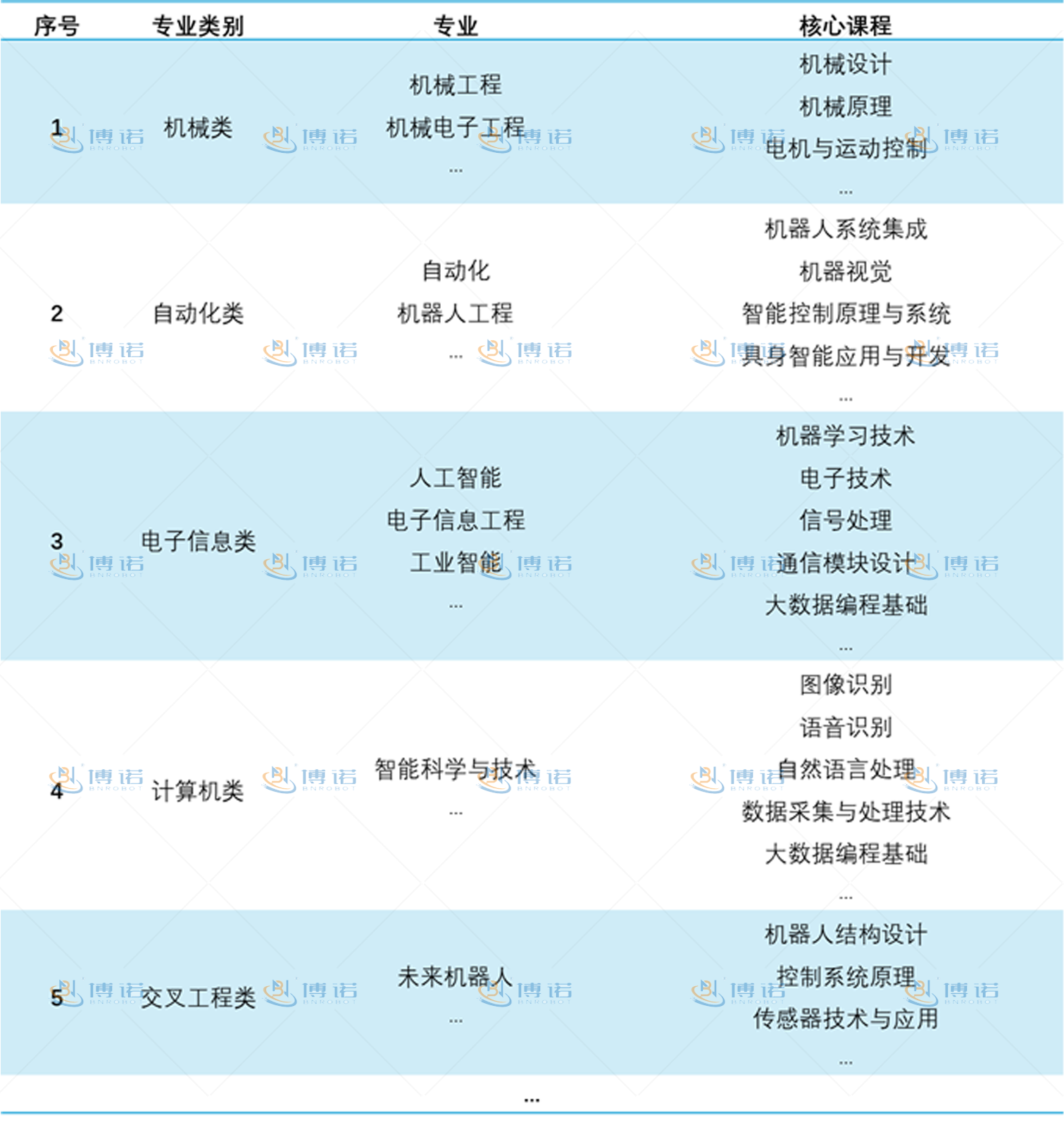
五、专业及课程
六、产品
(一)博诺智能助手(BN-AI500)
智能体开发聚焦自定义挂载知识库+大模型提示词工程实现功能落地。基于领域知识构建结构化或非结构化知识库,为智能体提供决策“基石”;同时,借助大模型提示词工程优化交互逻辑,通过精准设计指令模版、参数引导与对话流程,结合知识库数据并对模型回答参数进行动态微调,以生成专业回答,实现智能体的开发落地。
(二)肌腱驱动人形机器人(BN-01)

BN-01型肌腱驱动人形机器人以肌腱驱动技术为核心,兼具高仿生特性与低功耗优势,同时在稳定性上得到升级、运行更可靠、动作更精准。整机身高1.7m、体重32kg,搭载34个高自由度配置(单手臂5个、单手6个、髋部4个、单腿4个),配合电子五官、核心控制系统等功能模块,可实现点赞、握手、跳舞等拟人化肢体互动,且开放标准化开发接口,支持学生基于接口进行自定义功能开发与算法集成,进一步拓展实践深度。具备6小时超长续航与语音实时交互功能,既适配多场景实践应用,更能为本科院校相关专业提供全方位教学与科研支持。
教学应用方面,机器人可深度适配人工智能、智能机器人、自动化、机械工程等本科专业教学需求,核心支撑多门课程的实践教学与创新研究。学生能通过机器人系统学习具身智能技术应用、自然语言处理等核心内容,掌握人形机器人操作与装调、机器人运动控制、传感器融合应用、AI算法部署等关键技能。同时,依托高自由度结构、丰富传感器单元、虚实结合架构及开放的开发接口,可开展人机交互设计、步态规划算法优化、多模态数据采集与分析等二次开发项目,实现“理论学习-技术实践-创新研发”的全过程教学,培养工程实践能力与跨学科创新思维。
(三)人工智能开发平台(BN-AI511)

以智能家居、手写字识别、疲劳检测、物料分拣为典型应用场景,由六自由度机械臂,3D深度相机,灯光、风扇、窗帘语音控制模块,疲劳检测模块,物料分拣模块和AI教学模块等组成,涵盖典型深度学习算法应用、计算机视觉应用、语音识别、语音合成等人工智能基础技术,适合《人工智能概论》、《人工智能基础》课程的教学,以及《人工智能训练师》初、中、高级的职业技能等级认定。
(四)人工智能教学创新平台(BN-AI522)

以人机对弈(五子棋、象棋、围棋)、物料分拣、手势控制、语音控制为典型应用场景,由协作机器人、深度相机、AI智能体、AI机器人控制模块、PLC、扩拾音、人机对弈和物料分拣模块等组成。可满足Python编程、计算机语音与视觉应用、数据分析、基于DeepSeek的智能编程、工业控制、机器人编程等技术的教学。适合《人工智能训练师》初、中、高级的职业技能等级认定。
(五)具身智能机器人开发平台(BN-AI520)

以视觉抓取、自主导航、地图构建和语音驱动具身交互为典型应用场景;提供轮式具身智能机器人、人形具身智能机器人两种硬件形态可选,满足不同场景下的实训与应用需求;采用模块化设计,具备通用的开放型接口,包含AI视觉、AI语音、六轴协作机械臂、ROS移动底盘等模块。可完成从语言理解到物理实体执行的端到端闭环,强化“脑-耳-眼-手”协同的具身智能本质。满足具身智能、Python编程、ROS2应用、计算机视觉、人工智能语音等职业技能训练。
(六)Openmind OS控制系统
由埃夫特智能机器人股份有限公司开发的纯自主机器人控制系统,面向工业、人形、复合三类机器人的通用智能平台。该系统以感知、决策、控制为三大核心能力,可赋能机器人实现 “看懂环境、自主决策、精准行动” 的全流程自主运作。

(图来自启智(芜湖)智能机器人有限公司官网)
(七)墨斗IDE
基于 windows 系统的集成软件,面向用户提供便捷接口,实现机器人应用解决方案的软硬件一体化服务,有效降低机器人开发门槛,集成仿真、调试、编码功能,支持低代码开发模式。

(图来自启智(芜湖)智能机器人有限公司官网)

天津博诺智创机器人技术有限公司
总部地址:天津市津南区双港镇睿泽道7号博诺大厦
电话:022-58712888Copyright©2016-2026,www.bonus-robot.com,All Rights Reserved;版权所有©天津博诺智创机器人技术有限公司,未经许可,严禁复制。
天津博诺智创机器人技术有限公司津ICP备17000529号-2 津ICP备17000529号-4 津ICP备17000529号-5

